22/08/2013
Muletto ARM
Dalle analisi degli accessi noto con grande piacere che c’è sempre grande interesse riguardo ai server domestici, se preferite “muletti”.
Di recente il mio storico Epia 5000A ha subito un brutto colpo, una serie di guasti allo storage l’hanno costretto ad un down forzato, vista poi la difficoltà a reperire hard disk PATA sono stato costretto ad acquistare un adattatore IDE-SATA il quale a sua volta mi ha costretto a ritrasferire l’Epia nel primo storico case a causa di problemi di spazio (fisico stavolta).
Naturalmente nessun dato è stato perso grazie ai rigorosi piani di backup che ho implementato nel tempo, questa pausa però mi ha spinto a riflettere un po’ sul futuro del mio server domestico.
In tal senso l’esperienza con Raspberry PI è stata illuminante, le possibilità software sono pressochè le stesse del mio Epia x86, l’assorbimento è di gran lunga inferiore (meno di 1/5 in idle, addirittura circa 1/9 a pieno carico), la temperatura da dissipare pressochè trascurabile, gli ingombri ridottissimi, le performance simili.
L’unico aspetto limitante di Raspberry PI è lo storage, dover ricorrere ad un disco usb alimentato mediante un hub usb rappresenta un vero scoglio, o per lo meno trasformerebbe quello che oggi è un bel case ordinato e compatto in una foresta di mangrovie di cavi.
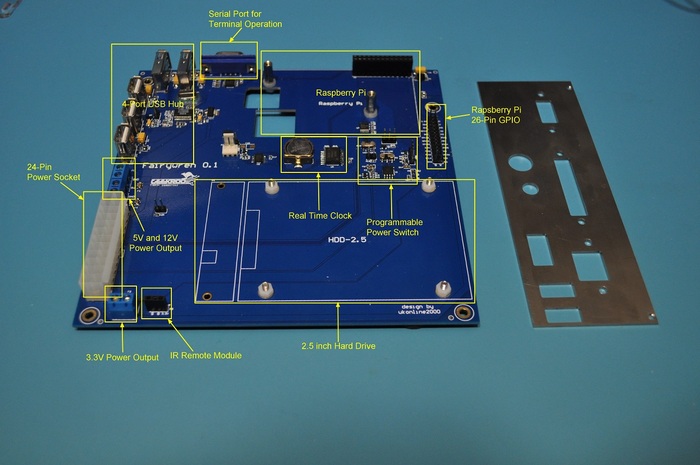
Una soluzione ci sarebbe, si tratta del progetto Fairywren, una mainboard mini-itx a cui connettere Raspberry PI con tutto l’occorrente per storage, rete, alimentazione, hub usb interno, un piccolo gioiellino che sta nascendo su Kickstarter e che rappresenterebbe una vera manna per chi come me vorrebbe usare Raspberry come server domestico.
Frequentando vari forum però mi è stato giustamente fatto notare che al di la dell’hype generato dal progetto Raspberry PI è basato su un SoC relativamente antiquato e piuttosto limitato in termini di risorse, idem per quanto riguarda progetti simili tipo BeagleBone.
Così sono venuto a conoscenza di altri progetti molto più interessante, magari meno rivolti alla ricerca o alla sperimentazione ma dotati di più risorse, insomma il perfetto punto di contatto tra le esigenze server e i vantaggi delle architetture ARM.
Due hanno attirato la mia attenzione, entrambi dotato di SoC Cortex A20 dual core, entrambi dotati di 1GB di ram DDR3 e un canale SATA, si tratta di:
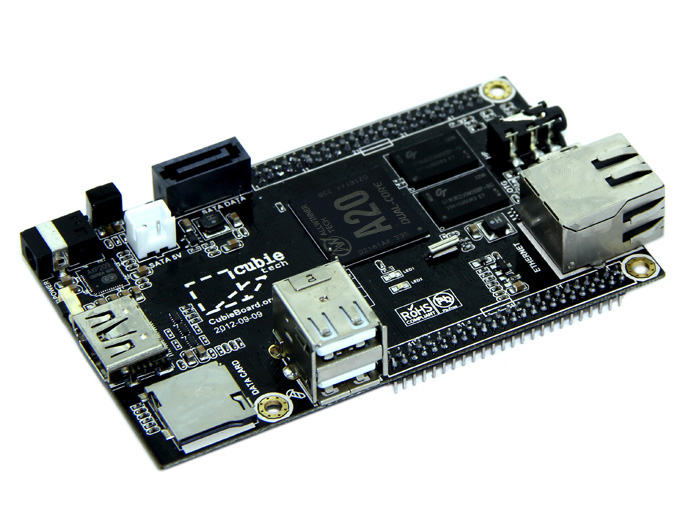
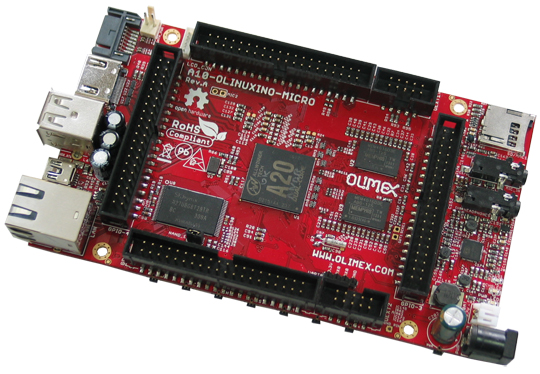
Entrambi ottimi progetti, simili dal punto di vista hardware ma differenti come approccio e filosofia di base.
Cubieboard 2 ha al suo attivo una comunità abbastanza diffusa, un forum piuttosto popolato e un layout piuttosto compatto, OLinuXino A20 è meno diffuso, un layout più “affollato”, una comunità meno popolosa ma è dotato di un gran numero di interfacce GPIO (quindi molto più indicato per la ricerca e applicazioni pratiche, un approccio simile a Raspberry PI per intenderci), entrambi sono progetti open hardware.
Di per se sarei fortemente attratto da entrambi questi progetti, l’unico aspetto che mi lascia dubbioso è il layout di questi sistemi, bellissimo e compatto ma difficilmente integrabile con un case ordinato e altrettanto compatto, insomma se dovessi utilizzarli mi ritroverei con una foresta di mangrovie di cavi come con Raspberry PI
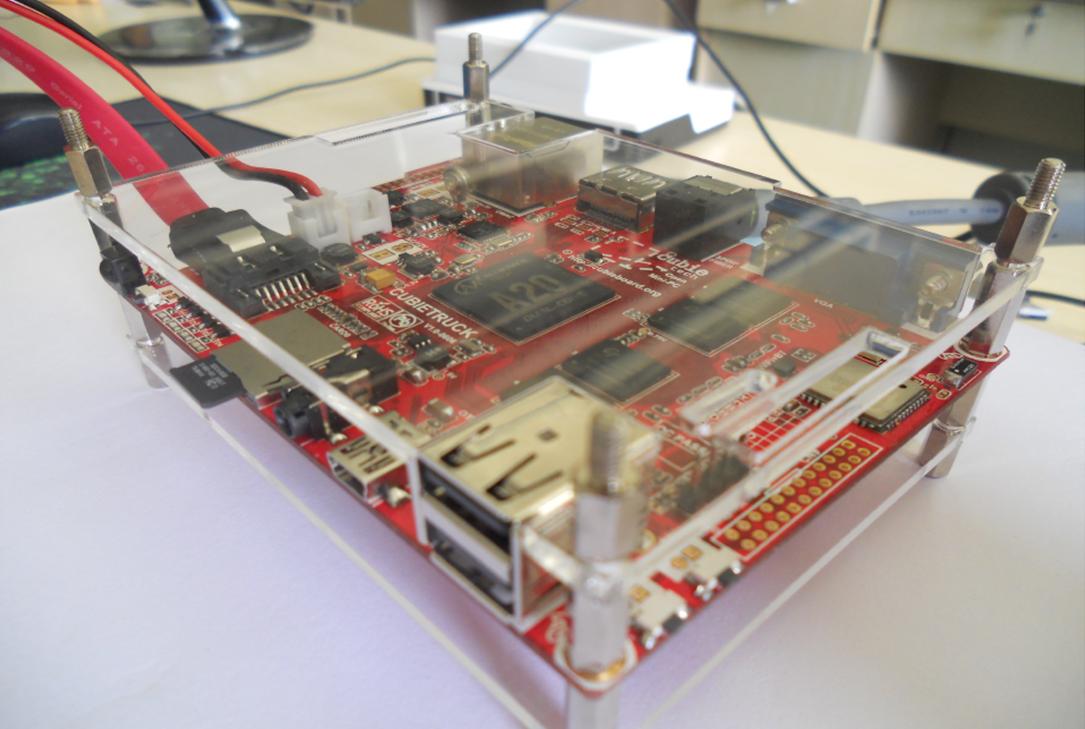
Quasi in risposta alle mia suppliche il team di Cubieboard ha annunciato un nuovo progetto open hardware chiamato Cubietruck che prevede:
- SoC A20 Cortex-A7 Dual Core
- 1 o 2 GB di ram
- canale SATA
- interfaccia di rete Gbps
ma soprattutto grande attenzione al layout, tanto da essere sovrapposto a quello di un hard disk da 2.5″, e addirittura pubblicando un prototipo di case veramente fantastico.
Mio al DAY1!!!
[EDIT]
Good news! Sembra che la produzione di Cubietruck stia per iniziare! Yuppi!!!! :)